
若果閣下有玩過 FPV 穿越競賽機,肯定深明「穿樹」的難度。同一動作如交由電腦進行操作,是否會變得容易得多?麻省理工學院(MIT)研發出建基於簡單的硬體平台,便能應付即時感應、分析、迴避一整套動作的飛行控制系統,成本只是 1,700 美元(約 13,200 港元或 55,200 台幣)。
應用立體視覺演算法
這套飛行控制系統其實是 MIT 電腦科學及人工智能實驗室博士生 Andrew Barry 的論文作品。Barry 指出,無人機難以負載光學雷達(Lidar)之類的重型裝置,而預先製作地圖又「不設實際」,所以研發出一套只需簡單硬體平台即可驅動的「立體視覺演算法」。
Barry 認為,無人機的移動速度高,在飛行途中其實無需理會太大的空間範圍,只需測量距離機體 10 米處的景物便可,因為由目擊至飛到的短時間內,環境往往是沒有變化的:「飛行時會推前 10 米視野,只要首 10 米內沒有障礙物,你便可以為四周建立完整地圖。」這套飛行控制系統會將感應範圍所採集的數據,自動整合為景深的資訊,相關技術原理可參閱文末的論文連結。
-

- 紅色是障礙物,綠色是預定航道
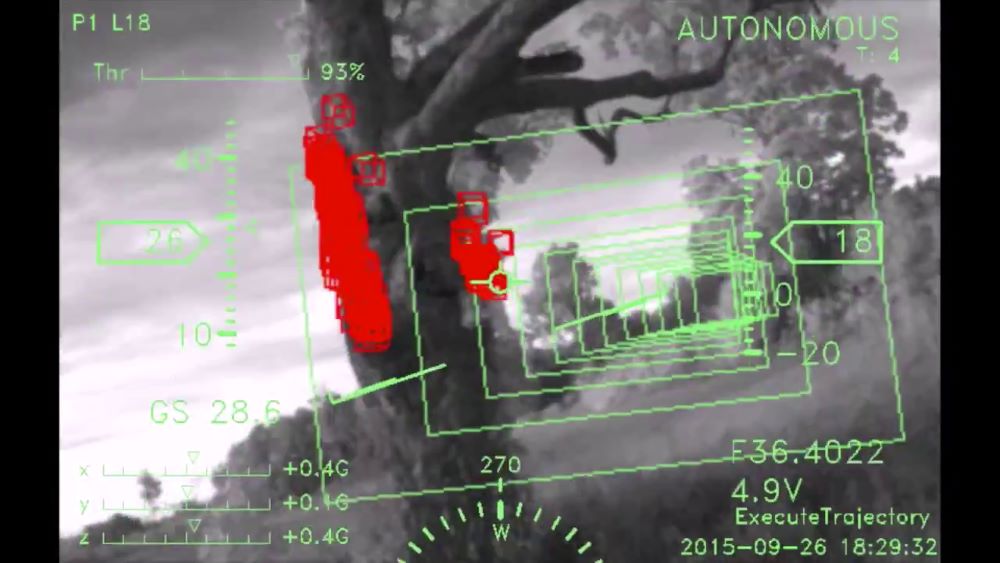
-

- 一邊飛行,一邊更新障礙物資訊和修正航道

-
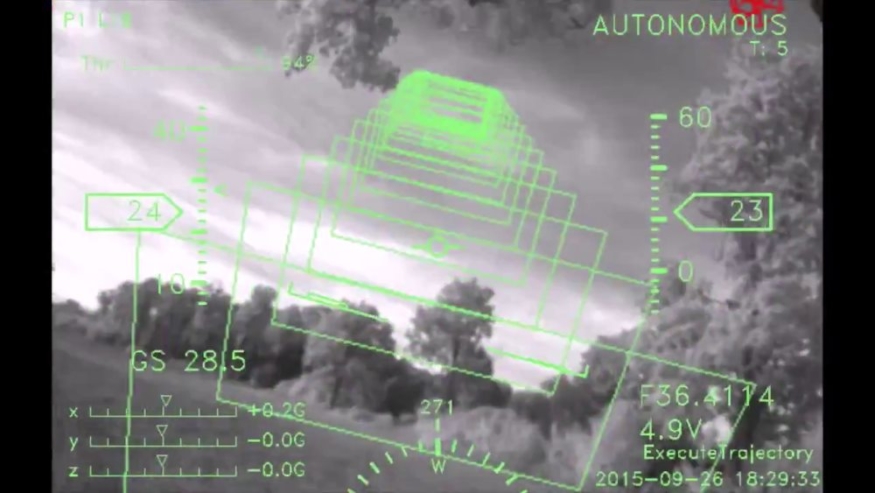
- 成功飛出叢林

-

- 穿樹實況

機體零件現成有售
實驗中所用的無人機時速最快為 30 哩(約 48 公里),航拍攝影機可每秒攝錄 120 畫格(120fps@240p)。Barry 解釋,攝影機的 FPS 拍攝規格要高一點,才可避免高速拍攝所帶的模糊影像。該無人機的零件全部是現成有售:機體為經改裝的 Team BlackSheep Caipirinha,一對機翼總長 34 吋,為 FPV 競速的專用機型;另外包括兩個置於機翼的 Point Grey Firefly MV 視像鏡頭,以及兩枚 ODROID-U2 處理器(1.7GHz 四核 Cortex-A9)。
以上程式連同相關論文已放於 GitHub 作開源共享。Barry 表示,目前該飛行控制系統仍然會間中出錯;如改用規格更強大的硬件平台來進行運算,便可一次過感應和分析不同的環境景深,不斷核對和修正預估航道,減低出錯的機會;若然改良成功的話,飛控系統應可應付環境變化更複雜的茂密森林。
【延伸閱讀】無人機搭配 Exyn 超強人工智慧系統 黑暗室內全自動導航避障
【延伸閱讀】無人機內置 Neurala 人工智慧 SDK 光靠相機自動飛行‧跟蹤
▼ MIT 自動穿越迴避系統示範片,但更矚目的可能是一直以人手遙控尾隨的航拍機!




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}