學術界不但喜歡研究自動避障,似乎還對簡化旋翼動力結構情有獨鍾。美國賓夕凡尼亞大學(University of Pennsylvania)模組機械實驗室便研製了單軸無人機 Piccolissimo,無需依賴外界感測器便可自行在空中穩定地懸停,機體更可 360 度自轉,進行全方位的環境偵測!
飛行器被動式空中自穩
Piccolissimo 號稱為全世界最小的自行驅動無人機。所謂「自行驅動」,意指飛行器可運用自身動力達到「被動式穩定」,只需利用一組發動機和旋翼,便可將能源轉化為機械動力,以抬升機體和穩定飛行,減低製造和維修成本。
反觀一般的多旋翼無人機,需通過加速度計、陀螺儀等感測器,不斷偵測周遭環境及機體狀況,同時又要協調多組發動機和旋翼運作,以校正飛行器的飛行方向或懸停位置。因此,飛行器的結構會較複雜,生產和保修成本亦會隨之而上升。

Piccolissimo 的槳翼和發動機來自現成的 Cheerson CX-STARS。
3D 列印製作飛行器框架
其實,Piccolissimo 的發動機和旋翼來自現成的迷你四軸機 Cheerson CX-STARS。研究團隊替發動機裝上來自 CX-STARS 的小槳翼,再鑲嵌至另一形如旋轉葉片的圓形框架,組成一台微型無人機;這圓形框架由 ProJet 6000 SLA 3D 列印機印製而成。
Piccolissimo 發動機啟動時,會產生作用力和反作用力,驅動小槳翼和旋轉葉片向相反方向轉動;在特定的轉速下,便能使機體懸停於半空,或向前移動。
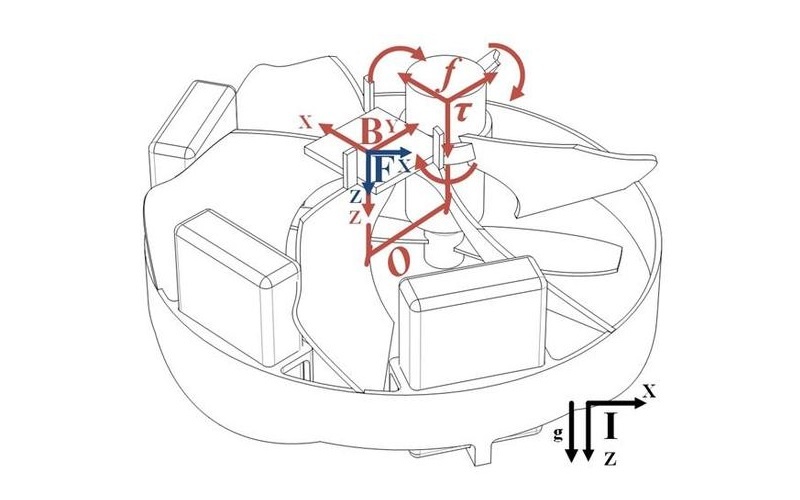
Piccolissimo 單軸無人機的發動機開啟後,便會產生作用力和反作用力,驅動小槳翼和旋轉葉片向相反方向轉動,從而產生升力抬升機體。
實現低成本 360 度感測
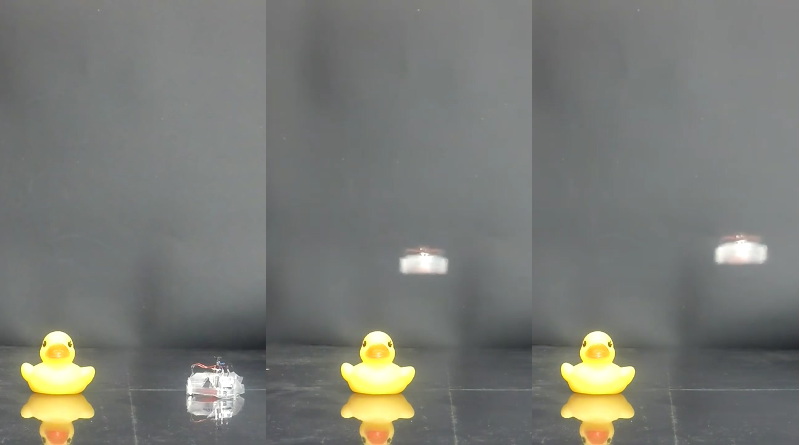
Piccolissimo 飛行器的直徑只有 39 毫米,能負載 1 克重的物件;據稱,如此負載力已足以承載「鏡頭和其他感測器」。當無人機處於自轉狀態時,還可如雷達般,進行 360 度全方位感測。
早前,瑞士蘇黎世聯邦理工學院(ETHZ)亦製作了單軸無人機 Monospinner,只以一組發動機轉動槳翼以提供升力,強調沒有襟翼、副翼、鉸位等等,甚至不設把能源轉化為機械動力的驅動器,亦沒有符合風動力學的表面。
【延伸閱讀】Monospinner 是單軸機,但不是直昇機,到底搞甚麼飛機?
▼ Piccolissimo 是意大利文的「最小」的意思,以下為無人機的操作示範影片:





