
無人機技術發展可謂一日千里,不過對技術不大了解的民眾,最關心的始終是飛行安全問題。各大品牌似乎也明白這一點,最近推出的新型空拍機均以避障系統作賣點。DJI Guidance、Intel RealSense,都是近期較受注目的無人機避障系統,加上超聲波的 eBumper4,以及傳聞會用上飛時測距方案的 Xiro Explorer 2,四大避障技術算是各有代表了。
#1. 超聲波
測距乃避障之本,最基本的測距功能,可以由超聲波/超音波(Ultrasound)說起。其實,超聲波感測器在無人機上非常常見,不過一般會用在飛行器底部作高度測量之用,真正用於避障系統的不多。外國的 eBumper4 超聲波感測避障模組,算是較少見的例子了。
eBumper4 回聲定位感測器能感知左、右、前、上方的障礙物,有效防撞飛行速度為每秒 8.5 呎,感應範圍約 15 呎。
超聲波避障的運作原理簡單,由揚聲器發出超聲波,遇到物體便會將之反射,然後由米高峰/收音咪接收反射波,藉由發射和接收的時間差,計算出物體與飛行器之間的距離,從而辨識障礙物。

eBumper4 避障裝置採用空拍機的可替換頂蓋方式呈現,頂蓋左、右、前、上方均設有超聲波感測器。
它的運作成本也屬眾方案中最低的,惟技術上卻存有不少缺憾,例如:超聲波易受環境聲音干擾,物體表面的反射能力亦有異,有機會影響測距數據。超聲波技術如應用於高度差較大的地方還可以,但如用在無人機作避障感測時,有效感知距離只有 5 米左右,這也間接影響到飛行速度。
此外,超聲波避障系統的耗電量較高,會縮短無人機的續航時間,因此以運作效率而論,不算是理想方案。
【延伸閱讀】告別撞機! eBumper4 聲吶迴避保護殼
▼ eBumper4 的避障示範影片
https://www.youtube.com/watch?v=yEyHD49dlQg
#2. 飛時測距
有甚麼比超聲波更快,當然是光速吧!如果把測距媒介由超聲音波換成光線又會如何?這就會變成飛時測距/時差測距(Time-Of-Flight,TOF)技術了。它的原理跟超聲波非常相似,由發射器發出光脈衝,碰上物體就會被反射,再由接收器接收反射光,以時間差去計算飛行器與物體之間的距離。零度(Xiro)在 CES 2016 上發表的 Xplorer 2 無人機,當中所用的避障技術正是 TOF 感知系統。

Xiro Xplorer 2 採用 TOF 感知技術來實現避障功能,飛行器背部的柱狀裝置頂端,正是用作 TOF 測距的感測器。
因為光的前進速度比超聲波快得多更快,所以 TOF 系統可在無人機懸停時,高速旋動以進行 360 度全方位掃瞄。以 Xiro Xplorer 2 為例,其機背柱狀裝置的頂端儀器,可發射出雷射光束,以每秒 50 次的速率進作 360 度掃瞄,以繪製出周遭障礙物的 3D 模型。TOF 有效感知距離亦比超聲波為略高,可達 8 至 10 米。惟當無人機飛行前進時,TOF 系統只可偵測前方障礙物。

零度早於 CES 2016 科技展上已發表 XIRO Xplorer 2,惟產品至今仍未上市。
TOF 系統發射的光線也會外在環境光線所影響,甚至比超聲波受到干擾更多,都市的光污染、玻璃幕牆的反射光、甚至太陽光都是干擾源之一:在猛烈日光之下,TOF 系統的感知距離會由 10米減少至 5 米。此外,TOF 系統需要非常精準而快速的處理運算,因此對處理器的硬體規格亦較高,運作成本自然亦水漲船高了。
【延伸閱讀】Xiro Xplorer Mini 玩換殼•Xplorer 2 雷達掃瞄•Xtreme 雙控操作
【延伸閱讀】CES 2016無人機預覽: XIRO Xplorer 2 空拍機真身揭曉
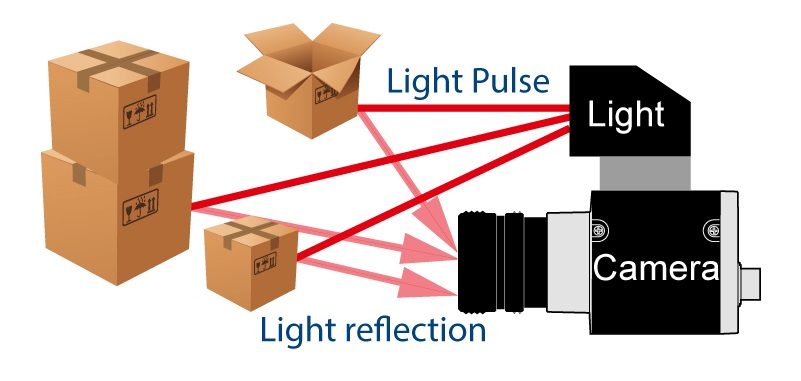
當無人機上的飛時測距儀器發射一道雷射光脈衝,雷射光照射到物體表面後被反射,再由儀器內的感測器接收光訊號,並記錄時間;光訊號往返一趟的時間,可換算為訊號所來回行走的距離,從而推算出飛行器與障礙物之間距離。(圖片來源:翻攝自 baslerweb.com)
#3. 紅外線
紅外線也可測距避障?這就要多得由英特爾(Intel)的 RealSense 感知技術了,事實上,Intel 早就把技術應用於 XBOX Kinect 之上;後來再將之移植至 Yuneec Typhoon H Pro 無人機上,可說是另一突破了。

Intel RealSense 感知模組可安裝於 Yuneec Typhoon H 空拍機上,配合機身上原有超聲波感測器(模組上方的兩個大孔),以實現較完整的自動避障功能。
Typhoon H Pro 的機身前方裝著一根類似 Kinect 鏡頭的橫條狀模組,內裡包括:
- RGB 視像鏡頭:可拍攝無人機前方的物體,惟所拍的只是 2D 平面影像,沒有物體深度數據;
- 紅外線感測器:向外發射紅外線,遇到物體時因距離的不同,反射的強度也會不同;
- 紅外線雷射投影器:接收由外界物體反射而來的紅外線,根據其反射量來辨識物體的深度。
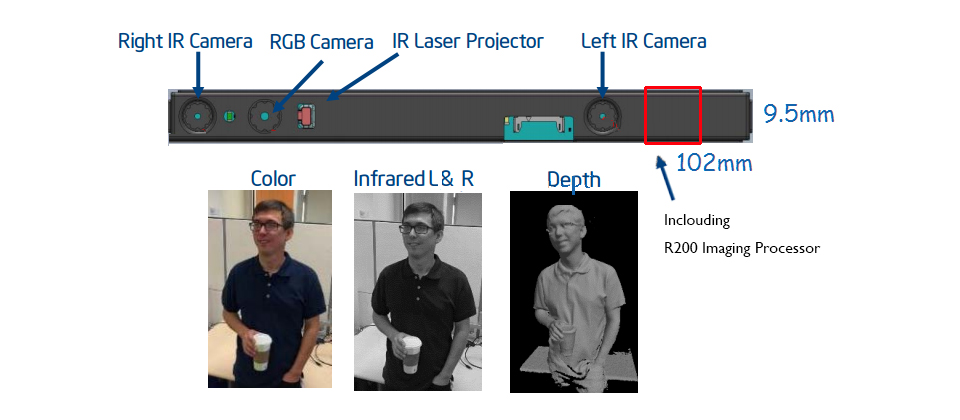
Intel RealSense 感測鏡頭模組上分別設有:1) 紅外線感測器、2) RGB視像鏡頭、3) 紅外線雷射投影器。
只要將上述 3 組感測器的數據整合起來,便可得出外界物體的 3D 立體影像數據,從而實現測距和避障感知的效果。理論上,紅外線極受強光影響,在戶外日光普照下便難以發揮作用,所以 Typhoon H Pro 進行避障偵測時,除紅外線感測外,也要依靠 RealSense 模組內的視像鏡頭和飛行器本身的超聲波感測器作輔助。
【延伸閱讀】Yuneec Typhoon H 戶外自動避障 RealSense 版 6 月底出貨
【延伸閱讀】CES 2016直擊: 自動避障無人機Yuneec Typhoon H 快閃登場
▼ Intel 官方釋出的 RealSense 模組裝載在 Yuneec Typhoon H Pro 上的避障示範片段。
#4. 視覺圖像複合型技術
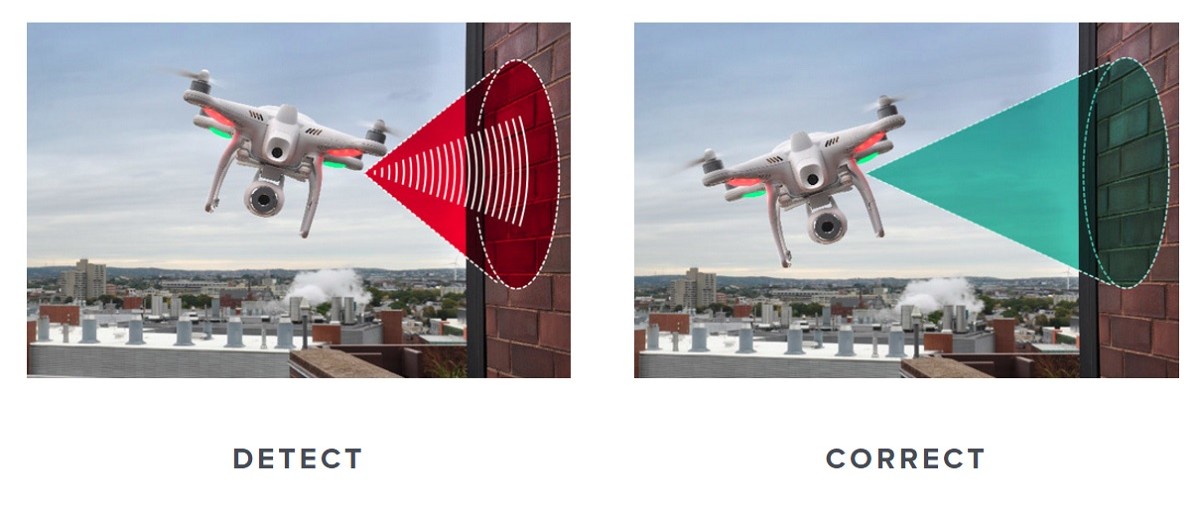
目前最完整的障礙物感知方案,是視覺圖像複合型技術,DJI Guidance 正是當中表表者。最新上市的 Phantom 4 Pro 雖增設了紅外線感測器作輔助偵測,惟其測距避障功能主要還是依靠兩組視覺感測器達成,故仍屬視覺圖像複合型技術方案。

DJI Guidance 用上視覺圖像複合型技術,黑色感知模組的中央單元是超聲波感測器,左右兩端小孔才是視像鏡頭。
雙鏡頭模組的測距原理就如人類雙眼,透過兩組鏡頭取景的差異,量度障礙物與感測器之間的夾角,再以三角測距定理,計算出障礙物與無人機之間的距離。受惠於感光元件的解析度愈來愈高,配合高時脈處理器,便可快速分析出圖像有否存在障礙物。

最新推出的 DJI Phantom 4 Pro機身前後均有裝設有雙鏡頭組成的雙目立體視覺感知系統。
DJI Guidance 的基本運作要求是,兩組視覺感測器能夠同時定位物體上的同一特徵點,一旦遇上特徵紋理不豐富的障礙物(如一堵白牆),雙鏡頭視覺感知便不能發揮作用了。
視覺圖像複合型技術的另一缺點是,在昏暗或黑夜環境下就無法運作。以 DJI Phantom 4 為例,其視覺感知系統的光照條件要在 15 lux 以上,弱光下便無效了。
【延伸閱讀】DJI Phantom 4 Pro 坐擁 1 吋 20MP CMOS 兼具前後避障五方感應
【延伸閱讀】DJI Phantom 4 初次評測:跟蹤‧避障好玩!秒速 20 米超快!
▼ 直接跳至 2:47 便可看到 DJI Phantom 4 Pro 避障技術演示片段
總結:各有優劣之處
綜觀四大避障感知技術方案,可說是各有優劣之處。超聲波具高穿透力特性,惟偵測距離短,只有 5 米左右。TOF 的有效感知距離稍遠一些,最遠可達 10 米;在暗光環境下很靈敏,可是遇上強光時卻未必能準確測量出障礙物距離。Intel RealSense 採用紅外線搭配單目測距的技術方案,有效感知距離同達 10 米,不過也受限於暗光下使用,面對強光就無所施其技。視覺圖像複合型技術的感知距離較長,DJI Phantom 4 的感知範圍便遠達 15 米,兼且無懼強光,但卻不敵弱光環境。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}