
美國加州大學伯克利分校一個研究小組開發了一款可在空中變形的 4 軸無人機。其設計的特別之處在於單是使用被動式旋轉接頭,毋須額外的驅動器就可實現飛行中摺疊機臂的功能。摺疊後的縮小機身可穿過間隙等狹小空間。
馬達推力控制機臂摺疊
與一般 4 軸飛行器不同,這架無人機的機臂與中央機身是用裝有彈簧的鉸鏈(sprung hinges)連接,當螺旋槳出現低推力時,彈簧鉸鏈容許飛行器的機臂向下摺疊。


當機臂的馬達(或稱電機)停止運轉時,彈簧將裝上鉸鏈的機臂拉到垂直位置,但當馬達啟動時,由馬達施加的力量即超過彈簧中的張力,並將機臂重新展開。這樣的一開或一合不需半秒就能完成,但機身的整體尺寸就減少了 50%。
可縮小穿越狹窄空間
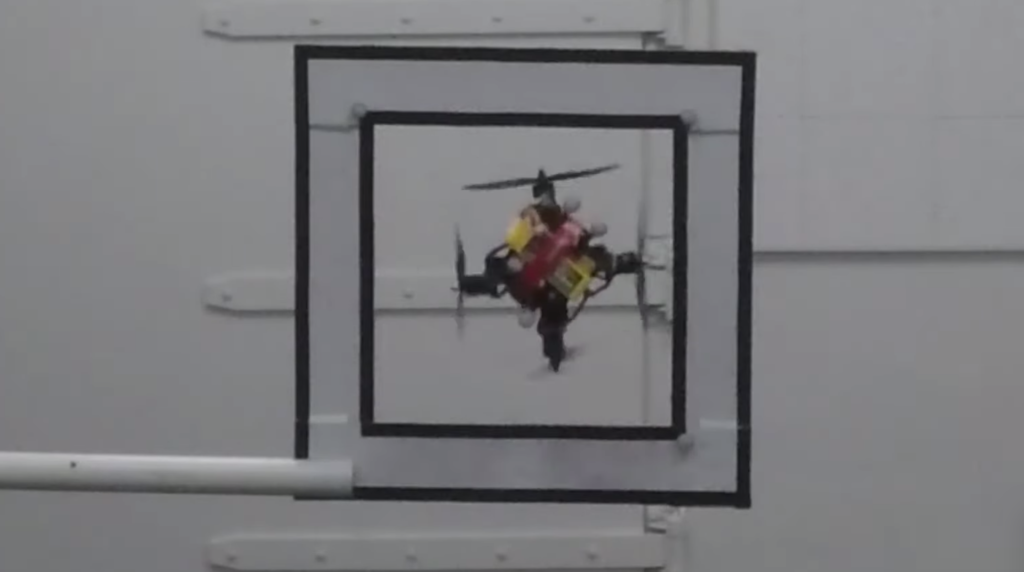
這種變形設計容許飛行器通過普遍「不能變形」 4 軸機不可穿越的狹窄空間,像是小窗戶。你可能會說,體積較小的無人機可在不變形的情況下做到這一點,但大一點的無人機其實更穩定,負載能力也較高,而且續航力更長。
另外它之所以這樣設計,還是因為可沿用現有的 4 軸飛行器遙控器及軌跡生成算法,但前題是要滿足一些控制輸入的附加約束。
【延伸閱讀】無人機空中變形! 這是一個 Transformer 的概念?
【延伸閱讀】「變形」無人機因應飛行環境自動摺疊機臂 優化能源效益





Leave A Comment
You must be logged in to post a comment.