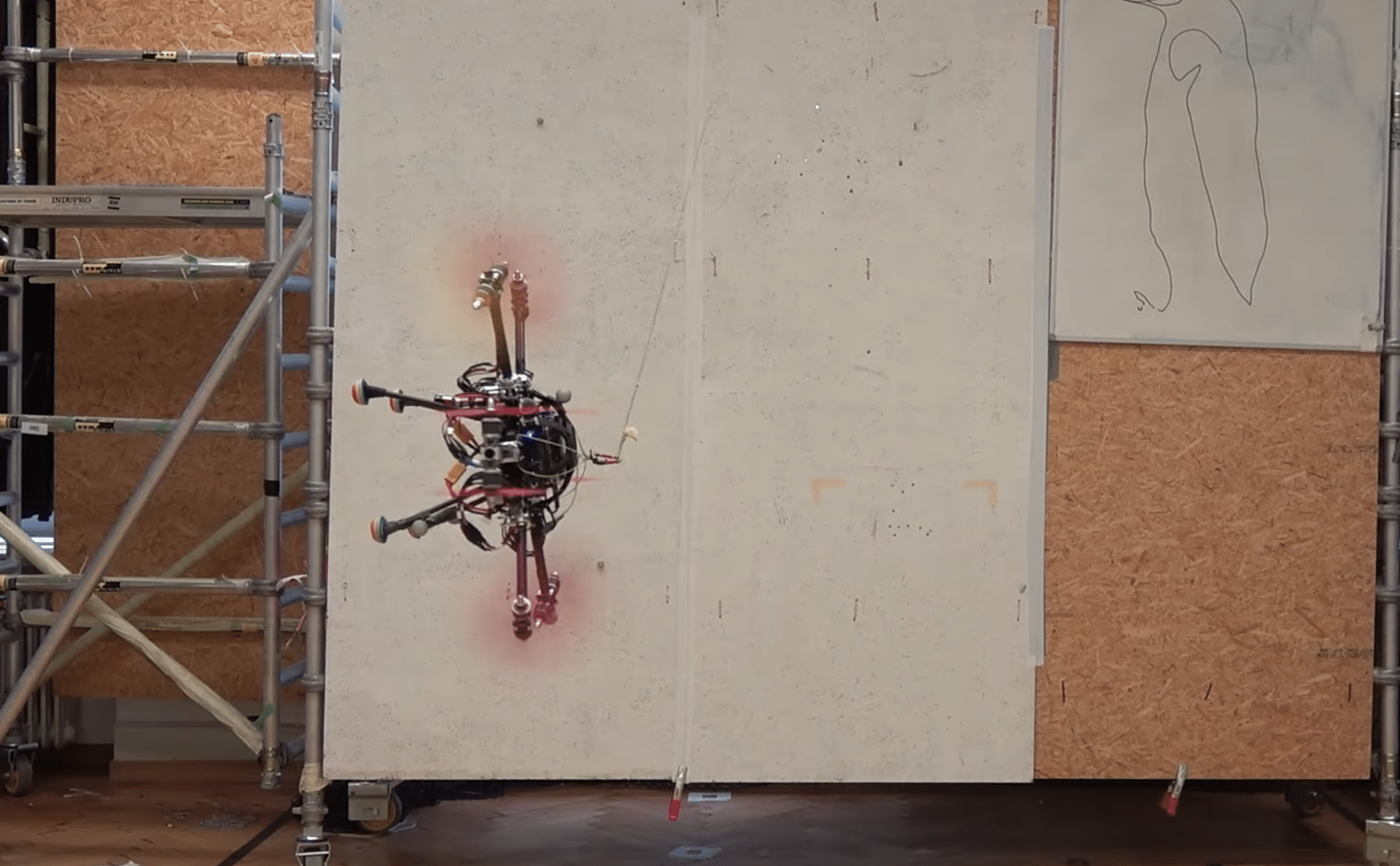
市面上一般的無人機只會以一種姿態懸停,但蘇黎世聯邦理工學院(ETH Zurich)的工程師研發了一架實驗性質的全向迷你無人機,結合高懸停效率後,可以任何姿態懸停、盤旋和飛行,如傾斜、上下反轉等,就像是在無重力狀態下一樣。
訣竅在於傾轉旋翼系統
雖然這不是面世的第一架全向姿態無人機,但這群工程師在論文中指出,他們是第一個將「全向姿態(pose omnidirectionality)」和高懸停效率結合起來的。
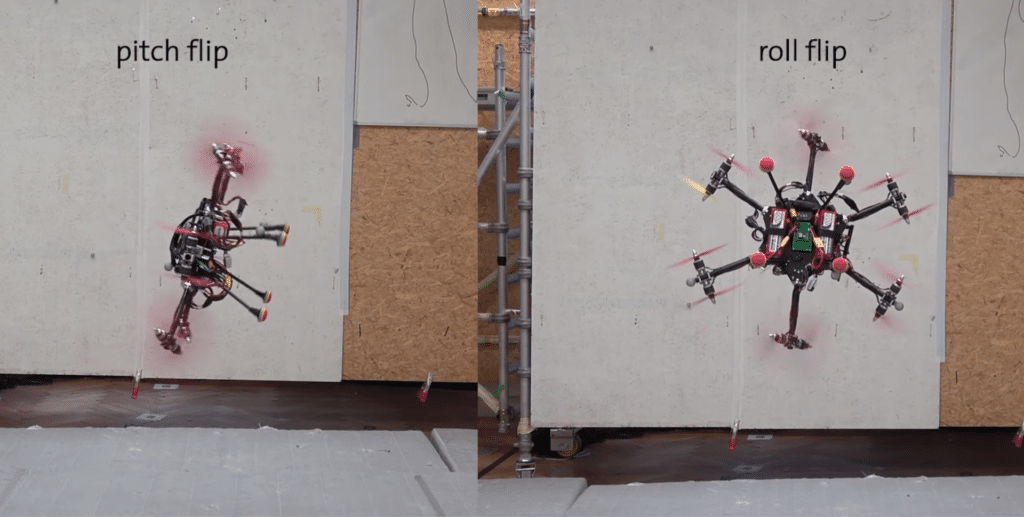
該無人機採用 6 軸 12 旋翼的設計,全向飛行、懸停的訣竅在於傾轉旋翼系統。每個轉子組件可以轉動來改變推力方向,加上精密的飛行控制系統,無人機可以在三維空間內以任何姿態自由移動,甚至在原位上下翻滾一圈。基於其靈活性,估計它相當適合用於詳細檢查一些物體和內部空間,像是電纜、廠房內部等。
可達更高精準度和效率
其實,像是 Stingray 500 等的可變螺距 3D 四旋翼無人機(Full collective pitch 3D quadcopter)也可以做到翻滾、側翻等的 3D 飛行。而 ETH Zurich 的這個全向無人機設計則沒有集體變槳的轉子複雜性,並可以達到更高水平的精準度、實用性和效率。
【延伸閱讀】無人機自動化特技飛行 傾斜穿越狹窄窗戶!
【延伸閱讀】可側身懸停的無人機:Voliro 飛行雜耍神乎奇技,應用潛能卻實際得很!
【延伸閱讀】無人機自動化特技飛行 傾斜穿越狹窄窗戶!
資料、圖片來源:ETH Zurich





Leave A Comment
You must be logged in to post a comment.