Intel 在 CES 2016 上利用 Yuneec Typhoon H 無人機示範 RealSense 自動避障功能,技驚四座,令相關技術頓時變得火熱起來,相信自動避障大有機會成為來年無人機的常備功能。原來美國麻省理工學院(MIT)亦正在研究自動防撞技術,主要用於尋找障礙物之間的空隙,以得出最優化的飛行航道。
直接找出安全通道
防撞技術採用的演算法通常會分析整個空間,找出當中無法通過的部分,再制定能夠避開這些障礙物的飛行路線。MIT 最新發表的兩項演算法卻反其道而行,專注於找出障礙物之間暢通無阻的空間,這可比起傳統的方法演算得更快,而且能夠應付狹小且密雜的環境。兩項演算法均以找出通道而非障礙物為目標,當中不但演算方式不同,甚至連適用的飛行器規格亦不一樣:
1. 多軸機方案
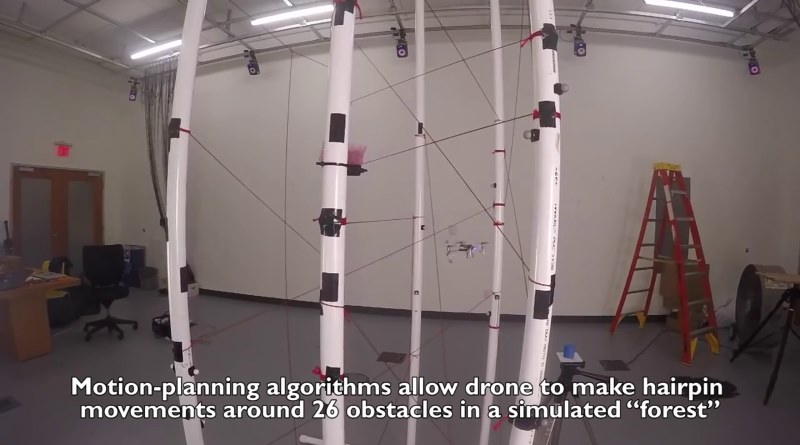
演算法先劃分出多個「無障礙區域」,再為每個區域配上動作,從而組成不會導致撞機的航道。團隊使用玩具級四軸飛行器試飛,成功以秒速 1 米穿越多個由繩陣、繩網、長柱組成的「森林」。研究論文主作者 Benoit Landry 現職於 3D Robotics,他形容這是有如「半杯滿水」的方案,情況樂觀但有待改善:現行方案無法即時規劃路線,每次生成防撞航道平均需時 10 分鐘。Landry 正擬調整感應範圍:先辨認較大範圍的安全區域,再尋求精確路徑。此演算法已於 GitHub 公開。
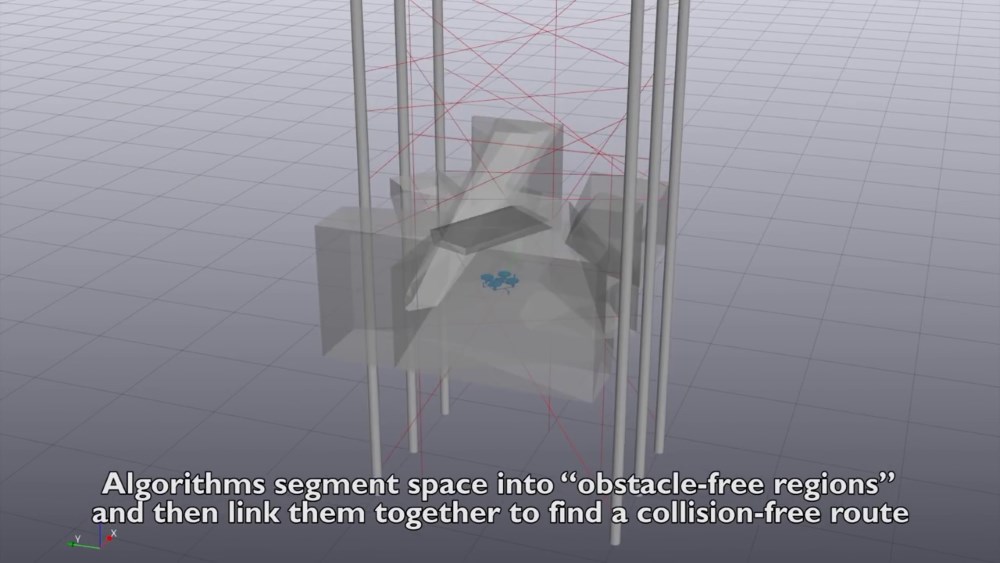
先找出「無障礙區域」,計算適當飛行步驟,再組成安全航道。
2. 定翼機方案
Anirudha Majumdar 的演算法可即時計算出安全航道,但要預先設定 40 至 50 組飛行動作。每組動作涉及的空間範圍呈管狀,飛行方向一端較窄,形成所謂「漏斗」形的飛行軌跡。演算法會因應障礙物以外的空間,選擇及排列應有步驟,從而組成完整航道,並確保飛行時不會偏離每個漏斗。Majumdar 補充,無人機未必要以大動作迴避障礙物才安全,因為這樣做易受陣風干擾,飛行風險反而較高。
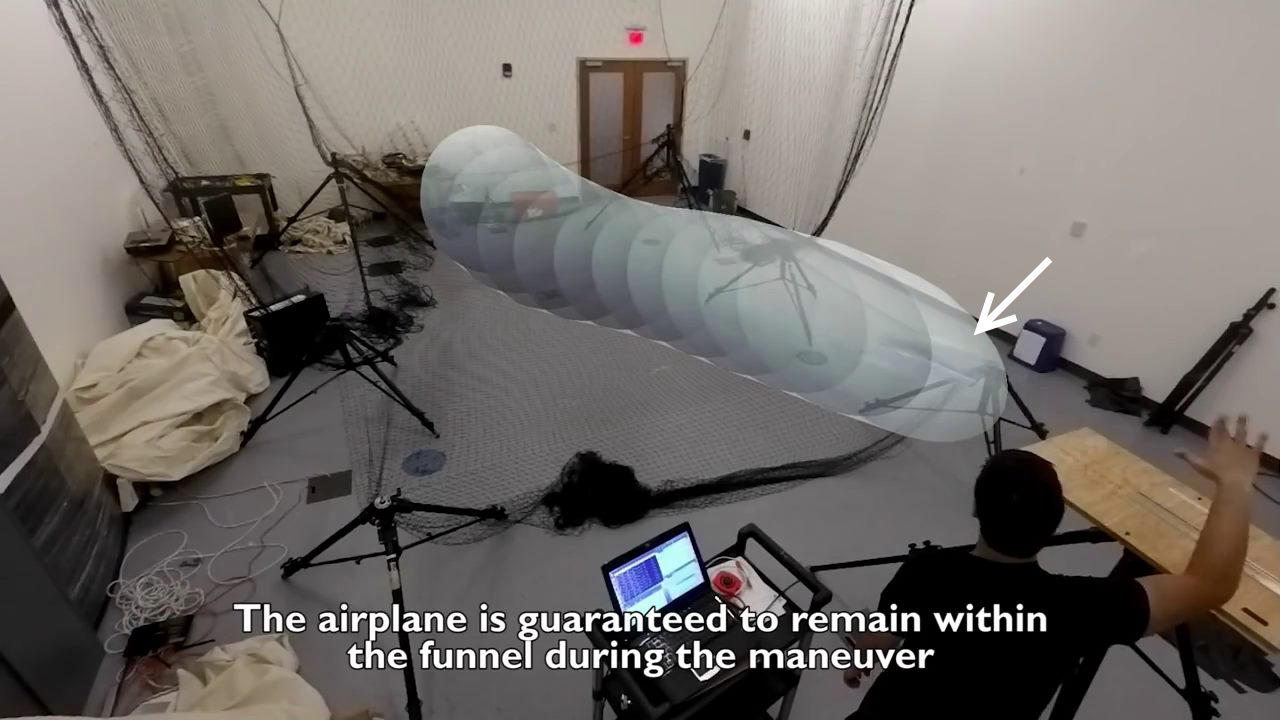
因應安全空域,即時配上預設的「漏斗」形的飛行動作。(定翼機位於箭嘴指示處)
早前 MIT 亦發表了一項能以時速 48 公里穿越叢林的技術,正是透過確認障礙物位置而成,不過是以縮小監測範圍,並頻密更新來提高效率和準確度。
▼ 上述 MIT 防撞技術的示範影片





